Autobauer setzen auf verschiedene Techniken um ihre Fahrzeuge in Zukunft auch autonom durch den Verkehr lenken zu können. Für die genaue Positionierung auf der Straße wird neben diversen Sensoren in den meisten Fällen auch GPS verwendet. Forscher des Southwest Research Institute (SwRI) haben ein neues System entwickelt, mit dem Fahrzeuge anhand von Bodenfotos ihre genaue Position bestimmen können, auch wenn GPS nicht zur Verfügung steht.
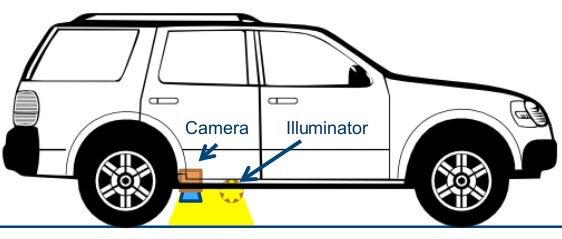
Das Ranger genannte System besteht aus einer Kamera sowie Leuchtdioden und ist unter dem Fahrzeug angebracht. Während der Fahrt fotografiert es dauerhaft den Straßenboden und erkennt die entsprechende Stelle beim nächsten Mal wieder. So könnten autonome Fahrzeuge beispielsweise durch längere Tunnel, in denen üblicher Weise kein GPS-Empfang besteht, selbstständig navigieren.
Mit ihrer Entwicklung konnten die Forscher bereits verschiedene selbstfahrende Autos mit deaktiviertem GPS und einer in Fahrtrichtung gemessenen Genauigkeit von zwei Zentimetern steuern. Quer zur Fahrtrichtung soll die Schwankung hingegen etwas höher liegen.
Die Messungen der Sensorik zeigen auch bei wetter- und naturbedingten Einflüssen eine hohe Genauigkeit. Selbst bei Blättern oder Schnee, welche die Fahrbahn bis zu 70 Prozent abdecken oder Regenwasser mit einer Tiefe von bis zu fünf Zentimetern, soll die Positionierung problemlos funktionieren. Auch bei üblichen Verwitterungen erkennt Ranger die Fahrbahn nach über einem Jahr wieder. Das System scannt Oberflächen aus Asphalt, Beton oder Pflastersteinen und sogar unbefestigte Straßen wie einen Fingerabdruck.
Um den Untergrund in ausreichender Genauigkeit erfassen zu können, darf das Fahrzeug jedoch nicht schneller als 130 km/h fahren. Bei der erstmaligen Überfahrt werden etwa 60 Bilder pro Sekunde aufgenommen. Um Speicherplatz zu sparen erfasst Ranger nur wichtige Merkmale, die ausreichen, um die Oberfläche später genaue zuordnen zu können. Zur Wiedererkennung fotografiert das System bei erneuter Überfahrt nur noch mit zehn Bildern pro Sekunde. Der Speicherbedarf beträgt etwa ein MByte pro Kilometer und Fahrspur.

Den Prototypen entwickelten die Forscher für rund 3.000 USD, eine Serienproduktion solle aber für einen Bruchteil der Kosten möglich sein. Wenn das System flächendeckend Anwendung finden würde, könnten die teilnehmenden Fahrzeuge auch untereinander die gescannten Bilder der Fahrbahn austauschen oder aber Straßenbetreiber die Daten an Fahrzeuge aussenden.
„Tatü Tata Tatü Tata
Freude am Fahren, wenn kein Fahrer da.
Tatü Tata Tatü Tata
Vorsprung durch Technik, wenn kein WLAN da. …“
Freud und Leid des fahrerlosen Fahrens auf den Punkt gebracht:
http://youtu.be/fU0QDDxDcy8
Viel Spaß beim Anhören!